Vorwort:
Es gibt verschiedene Möglichkeiten einen Azimut- oder Elevationswinkel einer
Antennenanlage zu erfassen. Wenn eine hohe Präzision und Reproduzierbarkeit
gefordert ist, so werden überwiegend digitale Messwertgeber zur Positionserfassung
eingesetzt. Die inkrementale Winkelwerterfassung wurde bereits in
ROTORSYS 32 eine Antennensteuerung für SAT und EME-Antennen
gezeigt. Hier möchte ich Ihnen eine Steuerung mit absoluter Winkelwerterfassung vorstellen.
Absolute Winkelerfassung:
Generell kann man sagen, daß die absolute Winkelcodierung wesentlich aufwendiger und teurer
als das inkrementale Meßverfahren ist. Im Gegenzug hat es aber auch wesentliche Vorteile.
Bei diesem Meßverfahren ist jeder Winkel durch eine eindeutige Codierung erkennbar.
Sie ist auf einer Trägerscheibe aufgebracht und wird in den meisten Fällen durch ein
optoelektronisches System abgetastet. Eine dauerhafte Verfälschung der Messwerte durch
elektrische Störungen oder Stromausfälle ist nicht möglich.
Es gibt verschiedene Möglichkeiten den Winkelmesswert zu codieren:
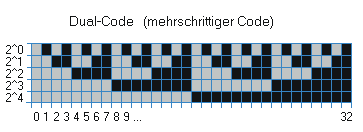 Dual-Code
Dual-Code
Der Dual-Code bildet einen Zahlenwert aus der Potenz zur Basis 2. Es handelt sich
um einen mehrschrittigen Code, d.h. beim Übergang von einer Meßposition zur nächsten
können sich mehrere Bits gleichzeitig ändern. Bei der Abtastung eines solchen Codes kann
es durch Fertigungstoleranzen der Codescheibe oder der Abtasteinheit zu Fehler kommen.
Dies würde dazu führen, daß beim Wechsel kurzzeitig falsche Positionswerte ausgegeben würden.
(Diese Codierung wird nur selten verwendet.)
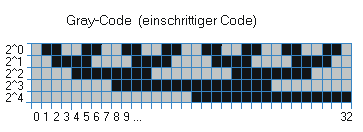 Gray-Code
Gray-Code
Der Gray-Code ist ein sogenannter einschrittiger Code, d.h. es ändert sich beim Übergang
von einer Position zur nächsten nur ein einziges Bit. Durch ungenaue Abtastung wird
demnach lediglich der Übergang von einer Position zur nächsten etwas verschoben, es kann
jedoch nichtzu völlig falschen Positionswerten kommen. Vor der Auswertung muß der
Graycode zunächst in einen Binärcode umgewandelt werden.
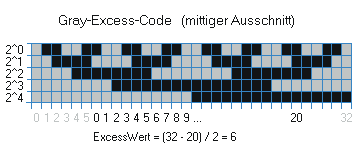 Gray-Excess-Code
Gray-Excess-Code
Der oben beschriebene einschrittige Code gilt für Auflösung, die sich als Potenz zur
Basis 2 darstellen lassen. Sollten andere Auflösungen realisiert werden, wird ein mittiger
Ausschnitt aus dem Graycode entnommen. Damit bleibt die Einschrittigkeit des Codes erhalten.
Allerdings beginnt der Darstellungsbereich nicht mehr bei Null, sondern er verschiebt sich um
einen bestimmten Betrag.
Der Gray-Exess-Code für den von Hannes OE5JFL
gebauten Encoder mit 0.5° Auflösung ist somit ein 10 Bit (1024 Schritte) Code, beidseitig gekappt
um 152 Schritte. 1024 - (360 * 2) / 2 = 152
 Encoder-Interface
Encoder-Interface
Die Encoder werden ueber die 5 Leitungen des Statusregister der Druckerschnittstelle LPT 1 oder 2
gemultiplext. Der Adressdecoder (74138) wird über das Steuerregister gesteuert und dieser adressiert
5 D-Latches (74374), 3 x 5 Bit für den Azimut und 2 x 5 Bit für die Elevation. Die Auflösung ist somit
15 Bit / 360° für den Azimut und 10 Bit / 90° für die Elevation. Mit sehr wenigen Aufwand ist damit
eine präzise Winkelmeßwerterfassung realisiert.
Die Steckverbinder zu den Encoder Con1 und Con2 sind Pin-kompatible zu jenen von
OE5JFL.
Schaltbild Encoder-Interface.
Relay-Interface
Die Rotoren werden ueber die Datenleitungen der Druckerschnittstelle LPT 1 oder 2 gesteuert (active high).
Ein vierfach Nand (4011) verhindert, daß beide Relais einer Ebene nie aktiv sein können.
Pin 2 (H-Pegel) = AZ-Rotor dreht im Uhrzeigersinn.
Pin 3 (H-Pegel) = AZ-Rotor dreht im Gegenuhrzeigersinn.
Pin 4 (H-Pegel) = EL-Rotor dreht nach oben.
Pin 5 (H-Pegel) = EL-Rotor dreht nach unten.
Pin 6 (H-Pegel) = AZ-Rotor dreht schnell. ( Delta > 10 Grad )
Pin 7 (H-Pegel) = EL-Rotor dreht schnell. ( Delta > 10 Grad )
Pin 25 = 0V.
Schaltbild Relay-Interface.
 RotorSys ABS
RotorSys ABS
Im Prinzip ist die Bedienung und die Funktion dieselbe wie bei der Version
RotorSys32 mit inkrementaler Winkelwerterfassung. Unterschiede gibt es
lediglich bei der Definition der Encoder. Unter Config/Encoder/AZ-Encoder bzw El-Encoder kann der
verwendete Encodertyp definiert werden, möglich sind folgende Encoder Binary, Gray und Gray-Excess.
Wird ein Gray-Excess-Encoder verwendet, so muß der Excesswert eingetragen werden.
Schlussbemerkung:
Mit diesem Programm hat der Autor versucht eine billige Loesung fuer das
Problem "antenna autotracking" zu finden. Natuerlich kann dieses System noch
verbessert werden. Dies sollte ein Anreiz sein das vielleicht
vorhandene analoge System durch ein rechnergesteuertes zu ersetzen.
Hinweise auf vorhandene Fehler oder Anregungen sind willkommen.
Download:
RotorSys ABS (349kB) für Windows 95, 98, Me, last update 15.01.05.
RotorSys-ABS-DDS-Server (220kB) DDS-Server der Antennenposition. Die Ini-Datei
"RotorSysAbs.ini" muß mit RotorSysABS.exe erstellt werden.
ObjData (250kB) Berechnungsprogramm für Sonne, Mond und Himmelskörper .
Absolut-Encoder-Testprogramm (202kB).
Zu Beachten:
Wird der RotorSys ABS unter Windows 2000, XP oder NT verwendet, so ist eine zusätzlicher
Driver zu installieren, da genannte Systeme den
Zugriff auf Ports aus Sicherheitsgründen verbieten.
Links zum Thema:
www.posital.de Encoder.
www.qsl.net/oe5jfl EME-Antenna-Control-System.